College of Health
24 Simulating the Impact of Carbon Fiber Insoles on Gait Metabolic Cost
Elizabeth Bowman; Kota Takahashi; and Daniel Davis
Faculty Mentor: Daniel Davis (Health and Kinesiology, University of Utah)
Abstract
Carbon fiber insoles, as a low-cost assistive device, have the potential to reduce whole-body metabolic costs of walking, especially for individuals affected by conditions that increase energy expenditure (e.g. elderly, muscular disorders). Elucidating the effects of carbon fiber insoles on muscular mechanisms would facilitate design improvements to reduce injury and optimize lower limb energy expenditure. Musculoskeletal modeling and simulation provide an approach by which insights into these muscle-specific mechanisms can be examined. The aim of this study was to examine the effects of increased footwear stiffness via carbon fiber insoles on lower-limb muscle energy expenditure using computational musculoskeletal simulations. Previously captured experimental motion capture, ultrasound, and indirect calorimetry measurements during treadmill walking with three levels of footwear stiffness were used to generate simulations of a lower-extremity model with an added torsional spring. The stance phase averaged soleus fascicle shortening velocity decreased with increasing stiffness in both the experimental and simulated data. Experimental and simulated whole body metabolic cost of transport varied similarly; simulated muscle group data showed muscles crossing the ankle joint consumed less energy with increasing footwear stiffness. This initial modeling framework has the potential to understand individual muscle contributions to whole-body metabolic cost, thereby improving the design of future assistive devices aimed at reducing the energy requirements of those affected by mobility conditions.
Introduction
Humans frequently choose to walk at a speed that corresponds with the minimum energy expenditure per unit distance (i.e., termed the metabolic cost of transport) (Ralston, 1958). However, this minimum energy expenditure may increase with mobility difficulties, with approximately 10% of all U.S. adults experiencing mobility difficulties due to age, muscle disorders, and neurological conditions (Iezzoni et al., 2001). The underlying mechanism of mobility difficulties and associated increased energy expenditure is believed to be the result of altered gait patterns which can potentially lead to increased fatigue, injury risk, healthcare costs, negatively affecting an individual’s quality of life (Ataullah & De Jesus, 2024; Herrmann et al., 2024; Ko et al., 2010).
To address the relationship between mobility difficulties and energy expenditure, a number of assistive devices have been designed to reduce lower limb energy expenditure. A notable example is an unpowered ankle exoskeleton that reduced the total metabolic cost of walking by 7% (Collins et al., 2015). However, exoskeletons are often expensive, and these devices are not made for daily wear. Carbon fiber insoles are far simpler, cheaper, and lower burden than traditional exoskeletons, with the potential to demonstrate similar reductions in metabolic costs (Hoogkamer et al., 2018). While exoskeletons provide external mechanical assistance by augmenting joint movements, carbon fiber insoles impact the lower limbs by providing increased shoe longitudinal bending stiffness (Ortega et al., 2021).Therefore, carbon fiber insoles/plates represent low-cost assistive devices that have the potential to reduce the metabolic cost of daily activities, such as walking, especially in those with mobility impairments.
Given their ubiquitousness in the running shoe market and their energy saving potential, numerous studies have sought to understand the mechanisms underlying the effects of carbon fiber plates/insoles. Patients with midfoot osteoarthritis experienced reduced walking pain, shorter gait cycle, and decreased muscle activity of the tibialis anterior with carbon fiber insoles (Yi et al., 2018). Further, the use of carbon fiber insoles contributed to a shorter gait cycle and reduced muscle activation on the tibialis anterior (Yi et al., 2018), which is a crucial muscle used for dorsiflexion during walking. This demonstrates how carbon fiber insoles have the potential to help individuals with mobility issues as the tibialis anterior is responsible for lifting the foot during the swing phase of gait while also controlling the lowering of the foot during heel strike, ensuring smooth walking gait. During level treadmill running, shoes with carbon fiber insoles had a significant reduction in whole body metabolic cost compared to shoes without carbon fiber insoles (Hata et al., 2024). This reduction in metabolic cost coincided with decreased muscle activation in the gastrocnemius medialis and gastrocnemius lateralis during the push-off-phase of running, but further investigation is needed to understand if other muscles were compensating. In another study involving walking, both the stiffness of carbon fiber insoles and walking speed influenced the ankle joint and its musculature as well as whole-body metabolic cost, although not in a straightforward manner (Ray & Takahashi, 2020). Increasing footwear stiffness via carbon fiber insoles demonstrated no statistically significant change in soleus muscle activation, but there was a significant increase in the soleus peak fascicle force and decrease in the soleus fascicle shortening velocity during the stance phase (Ray & Takahashi, 2020). The decreased fascicle shortening velocity during stance indicates a more optimal working condition since slower velocities improve muscle’s force-producing efficiency. However, changes in whole-body metabolic cost were dependent on footwear stiffness and walking speed (Ray & Takahashi, 2020). At a typical walking speed, the stiffest carbon fiber insole increased the whole-body metabolic cost by approximately 9%, compared with a 7% decrease in metabolic cost at a fast speed, highlighting a discrepancy between the effects of the carbon fiber insoles on the ankle joint musculature and the effects at the wholebody level (Davis et al., 2024; Ray & Takahashi, 2020) .
The current knowledge indicates a mismatch between how carbon fiber insoles alter ankle joint musculoskeletal mechanics and their overall impact on whole-body metabolic cost, which is challenging to capture using experimental methods. To gain insight into the inner workings of the lower extremities through non-invasive techniques, musculoskeletal modeling and simulation, facilitated by software such as OpenSim, can be employed (Seth et al., 2018). OpenSim imports dynamic data from motion capture systems to create subjectspecific models based on equations describing the interactions between the neural and muscular systems with the rigid multi-body skeletal system (Hicks et al., 2015; Karimi et al., 2021). Leveraging the dynamic data, this software can calculate crucial movement variables, such as muscle-generated forces and tendon stretch, predict kinematic and kinetic outcomes, and determine joint loads – metrics that are often impossible to measure directly through experimentation (Seth et al., 2018). Customization of musculoskeletal models allows for precise alignment with experimental motion data and a greater understanding of muscle function. Musculoskeletal modeling allows for a deeper investigation of how carbon fiber insoles change muscle activations and whole-body metabolic cost.
Despite previous investigations into the effects of carbon fiber plates/insoles on joint kinematics, kinetics, and whole-body energy expenditure, the underlying muscle-specific mechanisms contributing to these noted effects remain unclear. As such, the objective of this study was to generate simulations from a subject-specific model to examine the effects of footwear stiffness via carbon fiber insoles on energy expenditure in the major lower-limb muscles. These simulations were compared with previous experimental data including soleus fascicle dynamics (via ultrasound), lower-limb kinematics and kinetics (via motion capture), and trends in whole-body energy expenditure (via indirect calorimetry) to evaluate accuracy.
Methods
Experimental Data
Experimental data were obtained from a prior study (Ray & Takahashi, 2020) of healthy young adults. One participant (male, 1.69m, 68.5 kg) was chosen at random for model generation, and the initial pilot simulations are presented here. The experimental protocol was approved by the University of Nebraska Omaha’s Institutional Review Board, and all the subjects provided informed consent. Full details on experimental data collection and processing can be found in Ray & Takahashi (2020). In brief, motion capture (VICON, Oxford, UK), cine B-mode ultrasound (Telemed, Lithuania), calculations of metabolic cost (Parvo Medics, Sandy, UT, USA), and electromyography (Delsys, Natick, MA, USA) data was obtained from the participants as they walked on a treadmill (Bertec, Columbus, OH, USA) at three different walking speeds (1.25, 1.75, and 2.0 m/s) with three different footwear stiffness conditions in a block randomized order. The footwear stiffness conditions consisted of a standardized shoe (Reebok RealFlex Train) with no carbon fiber insole (low stiffness), a 1.6mm carbon fiber insole added to the shoe (medium stiffness), and a 3.2mm carbon fiber insole added to the shoe (high stiffness). For this analysis, one speed (1.25 m/s; a typical walking speed) was examined.
Simulation Model
A three-dimensional model of the human musculoskeletal system was created using OpenSim software (V4.5; Delp et al., 2007; Seth et al., 2018). The musculoskeletal geometry was based on the ‘gait2354’ model (Delp et al., 1990; Koo & Koo, 2019). This model, which contains 23 degrees of freedom and 54 muscles, has been used in multiple studies relating to lower limb calculations and derivations (Koo & Koo, 2019; Liang et al., 2022). The model consists of rigid body segments representing the trunk, pelvis, right/left thigh, right/left shank, right/left foot, and right/left toes. The mass of the default general model was 75.16 kg and the height was 1.8 m. The experimental marker set was added to the model and marker locations were manually adjusted using static trials to reduce the maximum marker error to less than 2 cm and the root mean square marker error to be less than 1 cm (Hicks et al., 2015). The generic model was scaled to the subject using a static pose to match their anthropometry by minimizing the different locations between the experimental and corresponding virtual markers. Due to the lack of upper extremity markers, the pelvis/torso was manually scaled using a manual scale factor from previous experimental motion capture analysis (Davis & Challis, 2023).
The uniqueness of this model lies in the addition of a torsional spring to the model’s MTP joint to represent the effect of the carbon fiber insoles. The torsional spring was chosen to best represent the characteristics of the carbon fiber plating because torsional springs store energy and release this energy in the form of a rotational force (Guo et al., 2023). The torsional spring was added to the MTP joint since Weaver et al. (2023) determined that the MTP joint angle was altered the most with increasing footwear stiffness. Similar to simulation studies examining lower-limb protheses (Miller et al., 2024; Russell Esposito & Miller, 2018), the torsional spring damping constant (1 N•m/rad) was unchanged across the footwear stiffness conditions. The stiffness value for each stiffness condition was determined from three-point bending tests completed by Ray and Takahashi (2020) and converted from N/mm to Nm/rad using the equations presented in Ortega et al. (2021).
Inverse kinematics was then employed to define model joint angles which result in the best match between modeled and experimental marker position data in a least-squares sense (Seth et al., 2018). The models underwent residual reduction (RRA) to reduce errors and improve dynamic consistency by reducing the residual forces and moments applied to the model (Sturdy et al., 2022). Finally, computed muscle control (CMC) was performed to estimate the muscle actuator states (activation and fiber length) needed to generate the measured motion (Seth et al., 2018).
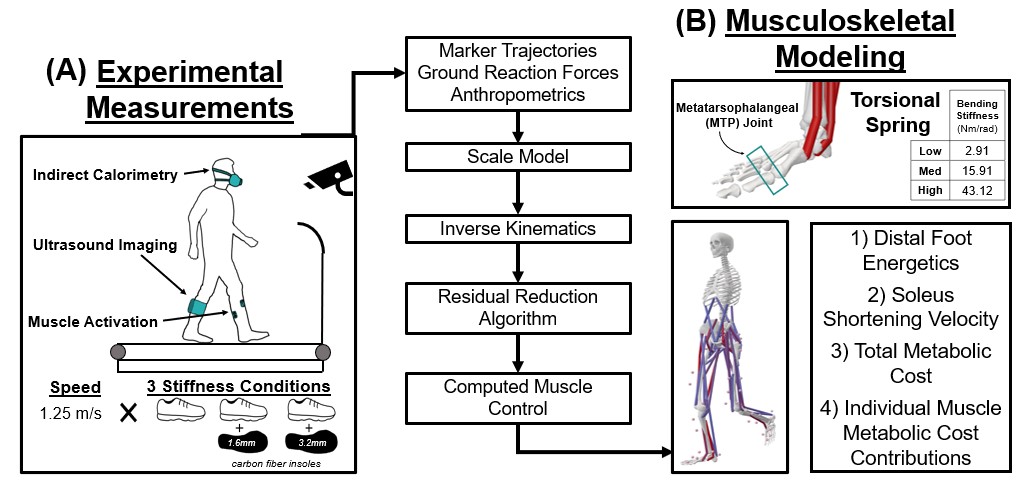
Figure 1: An overview of the (A) experimental and (B) musculoskeletal modeling methods to examine how increasing footwear stiffness affects the metabolic cost of walking. For the experimental methods (A), participants walked at one speed three times, each in a different stiffness condition (low, medium, high) while researchers collected motion capture, indirect calorimetry, ultrasound, and electromyography data. This movement was simulated in three separate musculoskeletal models (B) with an added torsional spring to the metatarsophalangeal joint representing the carbon fiber insole. These musculoskeletal models were then used to calculate distal foot energetics, soleus shortening velocity, total metabolic cost, and individual muscle metabolic cost contributions.
Analysis
Model validity was assessed through the comparison of simulated and experimental data. To assess how well a torsional spring at the MTP joint could capture distal foot mechanical energetics, mechanical power and net work performed about the MTP joint were extracted from the musculoskeletal modeling results and compared with the power and net work performed by the structures distal to the foot’s center of mass in the experimental data from Ray and Takahashi (2020). Experimental muscle fascicle velocity, determined from ultrasound data provided by Ray and Takahashi (2020) was used for data comparison with OpenSim’s simulated muscle fiber velocity. The stance-averaged soleus shortening velocity reflects the rate of muscle shortening during concentric contractions and influences the energy consumed by a muscle. Given that the soleus is the largest ankle plantar flexor muscle, examining its shortening velocity is important for gaining insights into muscle-specific energy consumption. Whole-body and muscle-specific costs were calculated and summed across each joint (trunk, hip, knee, ankle) for the simulated stride with the biarticular muscles being partitioned based on the ratio of their moment arms at each joint (Miller, 2014).
Results
The power fluctuations about the experimental distal foot and simulated MTP joint showed similar trends during the stance phase (Figure 2). The net work performed by the distal foot structures in vivo with increasing footwear stiffness varied in a similar pattern as the net work performed about the simulated MTP joint with increasing torsional spring stiffness: -6.7, -7.6, and -0.9 J compared with -8.4, -13.9, and -2.7 J, respectively. The stance-averaged soleus shortening velocity decreased with increasing stiffness in both the experimental and simulated data (Figure 3). Additionally, the experimental and simulated metabolic cost of transport varied similarly, with greater relative decreases in the medium stiffness condition compared with the higher stiffness condition (Figure 4). The trunk and knee joint musculature consumed very similar amounts of energy across stiffness conditions, whereas the hip muscles consumed the most energy in the high stiffness condition, followed by the low stiffness condition, and the least energy in the medium stiffness condition (Figure 5). Simulated muscles crossing the ankle joint consumed less energy with increasing torsional spring stiffness (Figure 5).
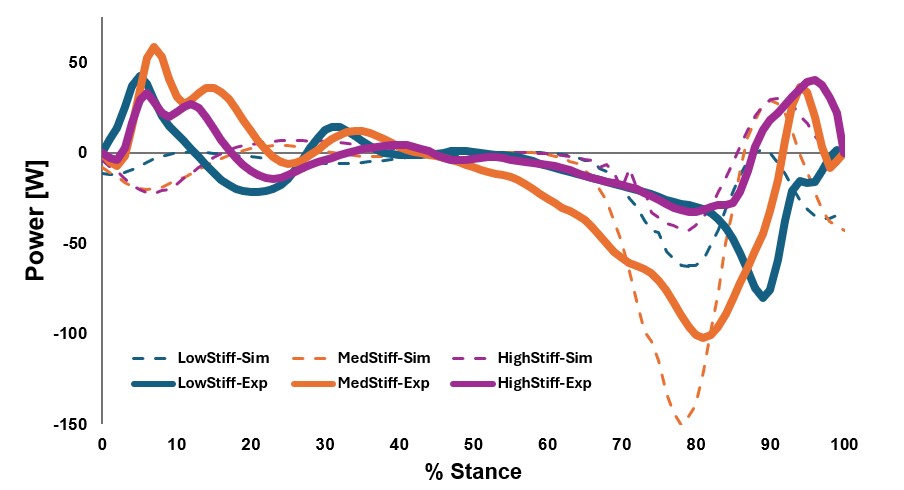
Figure 2: Power about the metatarsophalangeal joint (simulation) and distal foot (experimental) during the stance phase of walking at 1.25 m/s across the three footwear stiffness conditions (low, med, high).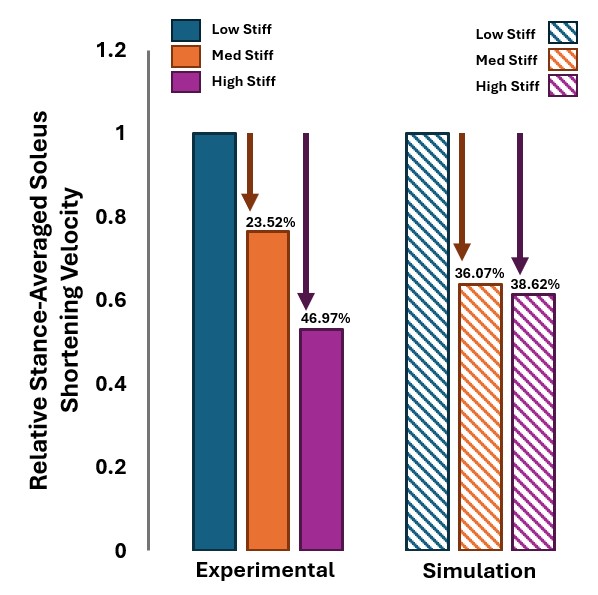
Figure 3: The stance-averaged soleus shortening velocity expressed relative to the low stiffness footwear condition for the experimental and simulated data across the three footwear stiffness conditions (low, med, high).
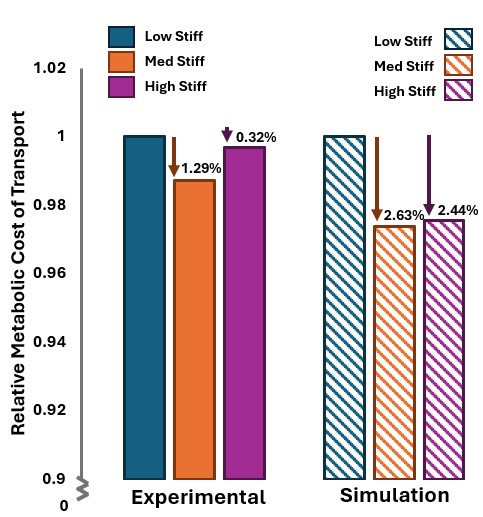
Figure 4: The metabolic cost of transport expressed relative to the low stiffness footwear condition for the experimental and simulated data across the three footwear stiffness conditions (low, med, high).
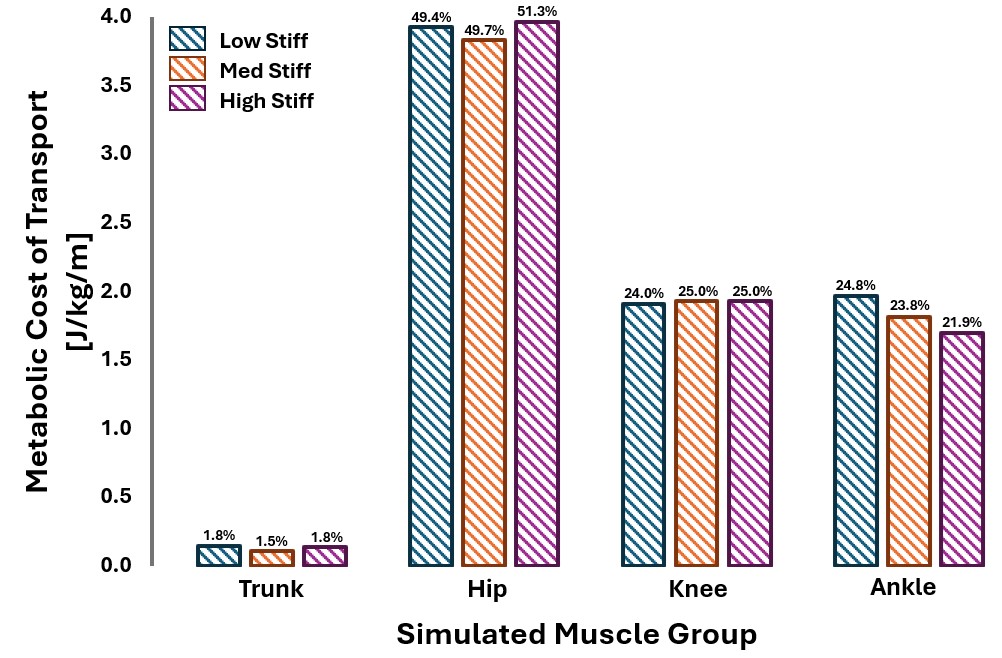
Figure 5: Metabolic cost of transport for muscles crossing each respective joint in each footwear stiffness condition (biarticular muscles were partitioned based on the ratio of the moment arms at each joint (Miller, 2014)). The percentage of the whole-body metabolic cost for each group is displayed above each stiffness condition.
Discussion
The objective of this study was to generate simulations from a subject-specific model to examine the effects of footwear stiffness on energy expenditure in the major lower-limb muscles. This study is the first to model carbon fiber insoles in OpenSim to determine muscle-specific energy expenditure, allowing for a better understanding of the lower-limb muscles interactions with carbon fiber insoles. The simulations were compared with previous experimental data (Ray & Takahashi, 2020) including soleus fascicle dynamics (via ultrasound), lower-limb kinematics and kinetics (via motion capture), and trends in wholebody energy expenditure (via indirect calorimetry) to validate the model.
When comparing the power fluctuations between the experimental distal foot and the simulated MTP joint, there were similarities across the fluctuations. In both the experimental and simulated power curves, the push-off phase was characterized by a period of negative power across all stiffnesses and was followed by a period of positive power in the medium and high stiffness conditions. These power fluctuation results are similar to Takahashi, Worster, and Bruening (2017) who presented power distal to the forefoot segment. Additionally, the similar pattern of increase in net work from low stiffness to med stiffness to a decrease in net work from the med stiffness to the high stiffness condition were seen in both the experimental distal foot structures and about the simulated MTP joint. The experimental distal foot mechanical energetics fall within the mean values of the net work distal to the forefoot when normalized to mass in Takahashi, Worster, and Bruening (2017). Although the simulated MTP joint had a similar pattern in net work across stiffness conditions compared to the experimental distal foot, the net work values when normalized to mass are almost twice as high compared with the experimental distal foot net work of Ray and Takahashi (2020) and Takahashi, Worster, and Bruening (2017). This could potentially be due to the lack of anatomical markers to define the MTP joint. Only one marker distal to the MTP joint was used experimentally, decreasing the confidence in that joint’s kinematics and kinetics. Additionally, the foot model used is a simplification of the human foot (e.g., it lacked foot musculature crossing the MTP joint). Qualitative similarities provide preliminary validation for the purposes of modeling the muscle-specific metabolic costs that are difficult to determine in vivo.
The soleus shortening velocity trends between experimental fascicle and simulated fiber data both showed decreases across the stiffness conditions; however, the experimental data had greater decreases across the stiffness conditions compared with the simulations. Given that only a single participant was used here, it is difficult to infer the source of this discrepancy. However, potentially inaccurate estimation of tendon slack length and tendon stiffness from cadaver data, variables which largely influence muscle length changes, likely plays a role. This is a preliminary evaluation of the model, so trends may not directly correspond with the experimental data. Similar to the distal foot mechanical energetics comparison with the simulated model, the preliminary soleus mechanical energetics provide a rough evaluation of the model validity.
The total metabolic cost of transport patterns was similar across stiffness conditions in the experimental and simulated version with a 1.29% and 0.32% decrease compared to the low stiffness condition in the experimental version compared with a 2.63% and 2.44% decrease compared to the low stiffness condition in the simulated version. Both had greater decreases in metabolic cost in the medium stiffness condition compared with the low and high stiffness conditions. However, similar to the comparison with the soleus shortening velocity trends, the simulated version had a less dramatic change from the medium and high stiffness conditions compared to the experimental version. Modeling is a simplification of a complex biological system where irregular bones & structures are simplified geometric shapes, joints are represented as ideal mechanical joints, and neurological signals are simplified (Delp et al., 1990). This simplification is not exactly representative of a biological system, so exact matches between the experimental data and simulated models are unlikely. Further model refinement is necessary to improve the agreement with experimentally measured data.
Exploring the preliminary results of muscle-group metabolic costs allows for initial insights into the effects of the carbon fiber insole on the individual muscles. The ankle joint saw a steady decrease in the metabolic cost of transport from 1.97 J/kg/m, 1.81 J/kg/m, and 1.69 J/kg/m across stiffness conditions. This raises the question of where the decreases in metabolic cost of the ankle are being redistributed to. To examine these potential muscle contributions, the muscles across the trunk, knee, and hip joints were examined further. Muscles actuating the trunk consumed very similar amounts of energy across stiffness conditions, with the actual metabolic cost of transport values of the trunk being highest in the low stiffness condition, 0.147 J/kg/m, and lowest in the medium stiffness condition, 0.113 J/kg/m. The metabolic cost of transport values of the knee was opposite of the trunk with the highest metabolic cost being in the high stiffness condition, 1.931 J/kg/m, and the lowest being in the low stiffness condition, 1.906 J/kg/m. The muscles across the hip saw differences in metabolic cost of transport across the stiffness conditions with the low stiffness being 3.924 J/kg/m, the medium stiffness being 3.833 J/kg/m, and the high stiffness being 3.965 J/kg/m. These preliminary results point to a possibility of metabolic cost contribution being dependent on stiffness condition. Potentially as the stiffness level increases, the muscles crossing the hip and knee require greater metabolic cost which could be where the metabolic cost of the ankles are redistributing, but further investigations into the specific muscles is needed to make a clear connection between the redistributions in metabolic cost. Additionally, looking at biarticular muscles compared to non-biarticular muscles to determine their metabolic cost of transport values would be of interest.
In conclusion, this initial modelling framework requires further refinement but has the potential to be used to better understand individual muscle contributions to whole-body metabolic cost. This improved understanding can help to design future assistive devices aimed at reducing the energy requirements of those with mobility impairment.
Acknowledgments
This work was supported by SPUR from the Office of Undergraduate Research at the University of Utah. This work was also supported by the NIH R01AR081287 grant awarded to KZT and the NIH T32TR004394 grant awarded to DJD. The authors would like to acknowledge Samuel F. Ray for collecting the experimental data associated with this study. I want to thank my mentor, Dr. Daniel Davis, for allowing me to partake in this research and sharing his knowledge about musculoskeletal modeling with me. Additionally, I appreciate and thank the rest of the Sayu Lab for the guidance I received throughout the completion of this project.
Reference
Ataullah, A. H. M., & De Jesus, O. (2024). Gait Disturbances. In StatPearls. StatPearls Publishing. http://www.ncbi.nlm.nih.gov/books/NBK560610/
Collins, S. H., Wiggin, M. B., & Sawicki, G. S. (2015). Reducing the energy cost of human walking using an unpowered exoskeleton. Nature, 522(7555), 212–215. https://doi.org/10.1038/nature14288
Davis, D. J., & Challis, J. H. (2023). The Influence Of Arch Stiffness On Walking Metabolic Cost: 682. Medicine & Science in Sports & Exercise, 55(9S), 231–232. https://doi.org/10.1249/01.mss.0000981868.79573.15
Davis, D. J., Ray, S. F., Franz, J. R., & Takahashi, K. Z. (2024, March). Increased Footwear Stiffness Reduces Estimated Soleus Metabolic Cost in Walking. American Society of Biomechanics Annual Meeting.
Delp, S. L., Loan, J. P., Hoy, M. G., Zajac, F. E., Topp, E. L., & Rosen, J. M. (1990). An interactive graphics-based model of the lower extremity to study orthopaedic surgical procedures. IEEE Transactions on Bio-Medical Engineering, 37(8), 757–767. https://doi.org/10.1109/10.102791
Guo, S., Yang, L., Yuan, Y., Zhang, Z., & Cao, X. (2023). Elastic energy storage technology using spiral spring devices and its applications: A review. Energy and Built Environment, 4(6), 669–679. https://doi.org/10.1016/j.enbenv.2022.06.005
Hata, K., Hamamura, Y., Noro, H., Yamazaki, Y., Nagato, S., Kanosue, K., & Yanagiya, T. (2024). Plantar Flexor Muscle Activity and Fascicle Behavior in Gastrocnemius Medialis During Running in Highly Cushioned Shoes With Carbon-Fiber Plates. Journal of Applied Biomechanics, 40(3), 192–200. https://doi.org/10.1123/jab.20230170
Hicks, J. L., Uchida, T. K., Seth, A., Rajagopal, A., & Delp, S. L. (2015). Is my model good enough? Best practices for verification and validation of musculoskeletal models and simulations of movement. Journal of Biomechanical Engineering, 137(2), 020905. https://doi.org/10.1115/1.4029304
Hoogkamer, W., Kipp, S., Frank, J. H., Farina, E. M., Luo, G., & Kram, R. (2018). A Comparison of the Energetic Cost of Running in Marathon Racing Shoes. Sports Medicine (Auckland, N.Z.), 48(4), 1009–1019. https://doi.org/10.1007/s40279-0170811-2
Iezzoni, L. I., McCarthy, E. P., Davis, R. B., & Siebens, H. (2001). Mobility difficulties are not only a problem of old age. Journal of General Internal Medicine, 16(4), 235–243. https://doi.org/10.1046/j.1525-1497.2001.016004235.x
Karimi, M. T., Hemmati, F., Mardani, M. A., Sharifmoradi, K., Hosseini, S. I., Fadayevatan, R., & Esrafilian, A. (2021). Determination of the correlation between muscle forces obtained from OpenSim and muscle activities obtained from electromyography in the elderly. Physical and Engineering Sciences in Medicine, 44(1), 243–251. https://doi.org/10.1007/s13246-021-00973-9
Ko, S., Hausdorff, J. M., & Ferrucci, L. (2010). Age-associated differences in the gait pattern changes of older adults during fast-speed and fatigue conditions: Results from the Baltimore longitudinal study of ageing. Age and Ageing, 39(6), 688–694. https://doi.org/10.1093/ageing/afq113
Koo, Y.-J., & Koo, S. (2019). Three-Dimensional Kinematic Coupling of the Healthy Knee During Treadmill Walking. Journal of Biomechanical Engineering, 141(081012). https://doi.org/10.1115/1.4043562
Liang, Y., Xu, T., Qi, S., Cao, X., Yeung, E., & Hu, Y. (2022). Non-age-related gait kinematics and kinetics in the elderly. BMC Musculoskeletal Disorders, 23. https://doi.org/10.1186/s12891-022-05577-2
Miller, R. H. (2014). A comparison of muscle energy models for simulating human walking in three dimensions. Journal of Biomechanics, 47(6), 1373–1381. https://doi.org/10.1016/j.jbiomech.2014.01.049
Miller, R. H., Bell, E. M., & Russell Esposito, E. (2024). Transfemoral limb loss modestly increases the metabolic cost of optimal control simulations of walking. PeerJ, 12, e16756. https://doi.org/10.7717/peerj.16756
Ortega, J. A., Healey, L. A., Swinnen, W., & Hoogkamer, W. (2021). Energetics and Biomechanics of Running Footwear with Increased Longitudinal Bending Stiffness: A Narrative Review. Sports Medicine, 51(5), 873–894. https://doi.org/10.1007/s40279020-01406-5
Ralston, H. J. (1958). Energy-speed relation and optimal speed during level walking. Internationale Zeitschrift Für Angewandte Physiologie Einschließlich Arbeitsphysiologie, 17(4), 277–283. https://doi.org/10.1007/BF00698754
Ray, S. F., & Takahashi, K. Z. (2020). Gearing Up the Human Ankle-Foot System to Reduce Energy Cost of Fast Walking. Scientific Reports, 10(1), 8793. https://doi.org/10.1038/s41598-020-65626-5
Russell Esposito, E., & Miller, R. H. (2018). Maintenance of muscle strength retains a normal metabolic cost in simulated walking after transtibial limb loss. PloS One, 13(1), e0191310. https://doi.org/10.1371/journal.pone.0191310
Seth, A., Hicks, J. L., Uchida, T. K., Habib, A., Dembia, C. L., Dunne, J. J., Ong, C. F., DeMers, M. S., Rajagopal, A., Millard, M., Hamner, S. R., Arnold, E. M., Yong, J. R., Lakshmikanth, S. K., Sherman, M. A., Ku, J. P., & Delp, S. L. (2018). OpenSim: Simulating musculoskeletal dynamics and neuromuscular control to study human and animal movement. PLoS Computational Biology, 14(7), e1006223. https://doi.org/10.1371/journal.pcbi.1006223
Sturdy, J. T., Silverman, A. K., & Pickle, N. T. (2022). Automated optimization of residual reduction algorithm parameters in OpenSim. Journal of Biomechanics, 137, 111087. https://doi.org/10.1016/j.jbiomech.2022.111087
Takahashi, K. Z., Worster, K., & Bruening, D. A. (2017). Energy neutral: The human foot and ankle subsections combine to produce near zero net mechanical work during walking. Scientific Reports, 7(1), 15404. https://doi.org/10.1038/s41598-017-15218-7
Weaver, M., Takahashi, K., & Lenz, A. (2023). Effects of Different Thickness of Carbon Fiber Insoles on Foot Motion using X-Rays. https://uen.pressbooks.pub/range24i2/chapter/weaver/
Yi, T., Kim, J. H., Oh-Park, M., & Hwang, J. H. (2018). Effect of Full-Length Carbon Fiber Insoles on Lower Limb Kinetics in Patients With Midfoot Osteoarthritis: A Pilot Study. American Journal of Physical Medicine & Rehabilitation, 97(3), 192–199. https://doi.org/10.1097/PHM.0000000000000821
Media Attributions
- 137489262_eb_methods_figure_updated
- 146879585_eb_power_figure
- 146879582_eb_soleus_velocity_figure_updated
- 146881378_figure2_relativetotalmetcost
- 146881870_eb_simulatedmusclegrouppercentages
